Cabe señalar que estas ecuaciones se utilizan
siempre que el ángulo de dirección sea adyacente al
eje de las "x" (como en el ejemplo), en caso de que ( sea
adyacente al eje "y", las ecuaciones se invierte. Al proceso de
encontrar las componentes rectangulares de un vector se le
denomina descomposición rectangular de
vectores.
Cuando se determina el vector a partir de sus
componentes rectangulares se denomina al proceso
composición rectangular de vectores . El
vector resultante se puede determinar mediante el teorema de
Pitágoras, y su ángulo de dirección con
cualquiera de las relaciones trigonométricas.
Equilibrio de la
partícula en forma vectorial cartesiana
Un sistema vectorial, es un conjunto de vectores
que actúan sobre una partícula o un cuerpo
rígido al mismo tiempo. Cuando varios vectores
actúan sobre una partícula dada, todos ellos tienen
el mismo punto de aplicación (son concurrentes) y pueden
ser reemplazados por un solo vector al cual se le denomina
vector resultante
Un vector resultante, es un vector que produce el
mismo efecto que el conjunto de vectores.
Para resolver un sistema vectorial concurrente, se
pueden utilizar diferentes métodos estos son:

Equilibrio de una partícula.
Cuando la resultante de todas las fuerzas que
actúan sobre una partícula es igual a cero, la
partícula está en equilibrio.
Una partícula sobre la cual actúan dos
fuerzas, estará en equilibrio si las dos fuerzas tienen la
misma magnitud y la misma línea de acción, pero
dirección opuesta.

Las condiciones necesarias y suficientes para que una
partícula esté en equilibrio son

Esta condición se le conoce como primera
condición de equilibrio o Equilibrio
trasnacional.
Para resolver problemas en los que se considera una
partícula en equilibrio, se puede dibujar un diagrama de
cuerpo libre a partir del cual se aplican las ecuaciones
anteriores para determinar las incógnitas
planteadas.
Diagrama de cuerpo libre es una
representación en un eje coordenado de todas las fuerzas
que actúan sobre una determinada
partícula.
Resuelve los siguientes problemas que consideran a la
partícula en equilibrio.
Es importante resaltar que puedes resolver por los
métodos gráficos ó analíticos con las
ecuaciones anteriormente mostradas.
Producto escalar
y producto vectorial de dos vectores en el
plano
PRODUCTO ESCALAR.
El producto escalar de dos vectores A y B se
denota como A ( B por esta notación el producto
escalar también se denomina producto
punto.
Para definir el producto escalar A ( B, dibujamos
A y B con sus orígenes en el mismo punto. El
ángulo entre sus direcciones es (, siempre entre 0° y
180°. Con estas condiciones, se define A ( B como la
magnitud de A multiplicada por la componente de B
paralela a A (fig b)o bien como la magnitud de B
multiplicada por la componente de A paralela a B
(fig. c) quedando como:

PRODUCTO VECTORIAL
El producto vectorial de dos vectores A y B,
también llamado producto cruz, se denota con A x
B. Este producto cruz se utiliza para describir magnitudes
físicas como el momento angular, y la relación
entre fuerza y velocidad que adquiere una partícula al
penetrar en un campo magnético todas ellas magnitudes
vectoriales.
Para definir el producto vectorial de A y B, se dibujan
los vectores con sus orígenes en el mismo punto.
Así, los dos vectores están en un plano. Definimos
el producto vectorial como un vector perpendicular a éste
plano y con una magnitud C igual a AB Sen (, es decir, C = A x
B

Fricción
Cuando dos superficies están en contacto, siempre
se presentan fuerzas tangenciales, llamadas fuerzas de
fricción, cuando se trata de mover una de las
superficies con respecto de la otra. Estas fuerzas están
limitadas en magnitud y no impedirán el movimiento si se
aplican fuerzas lo suficientemente grandes.
Se distinguen dos tipos de fricción:
a) Fricción en fluidos: Se desarrolla
entre capas de fluidos que se mueven a diferentes
velocidades. La fricción en fluidos es de gran
importancia en problemas que involucran el flujo de fluidos a
través de tuberías y orificios o cuando se
está trabajando con cuerpos que están
sumergidos en fluidos que están en movimiento.
Además, la fricción en fluidos también
es básica en el análisis del movimiento de
mecanismos lubricados.b) Fricción seca que algunas veces se
denomina como fricción de Coulomb. Se desarrolla
cuando cuerpos rígidos están en contacto a lo
largo de superficies que no están
lubricadas.
En tema solo estudiaremos la fricción
seca.
Cuando un bloque de peso W se coloca sobre una
superficie horizontal plana, las fuerzas que actúan sobre
el bloque son su peso W y la reacción de la superficie,
que es normal a la misma y está representada por
N.

Supóngase que se aplica sobre el bloque una
fuerza horizontal P. Si P es pequeña, el bloque no se
moverá; por lo tanto, debe existir alguna ora fuerza
horizontal, la cual equilibra a P. Esta otra fuerza es la
fuerza de fricción estática Fs se
supone que está fuerza se debe a las irregularidades de
las superficies en contacto y, en cierta medida, a la
atracción molecular.
Si se incrementa la fuerza P, también se
incrementa la fuerza de fricción Fs, la cual
continúa oponiéndose a P, hasta que se magnitud
alcanza un cierto valor máximo Fm. Si P se incrementa
aún mas, la fuerza de fricción ya no la puede
equilibrar y el bloque comienza a deslizarse. Tan pronto comienza
a moverse el bloque, la magnitud de Fs disminuye de Fm a
un valor menor Fk.
Fk representa la fuerza de fricción
cinética que permanece aproximadamente constante cuando la
superficies se mueven una con respecto de la otra.
El valor máximo de la fuerza de
fricción estática Fs es proporcional a la
normal de la reacción de la superficie:

Como dichos coeficientes también dependen de la
condición exacta de las superficies, sus valores raras
veces reconocen con precisión superior al 5%. Algunos
valores aproximados de coeficientes de fricción
estática para distintas superficies son los siguientes, y
los valores correspondientes del coeficiente de fricción
cinética serían alrededor de un 25%
menores.

Pueden ocurrir cuatro situaciones diferentes cuando un
cuerpo rígido está en contacto con una superficie
horizontal:

Cuando los cuerpos rígidos en contacto se
encuentran en una superficie inclinada y la fuerza Wx se
incrementa hasta que el movimiento se vuelve inminente, el
ángulo entre la reacción (normal) y la vertical
aumenta hasta alcanzar un valor máximo. Este valor recibe
el nombre de ángulo de fricción estática y
se representa por (s, donde

Equilibrio del
sólido rigido en dos dimensiones
Condiciones de
equilibrio.
Las condiciones necesarias y suficientes para el
equilibrio de un cuerpo rígido se pueden obtener
igualando
(Fx = 0 (Fy = 0
A lo que se conoce como primera
condición de equilibrio o equilibrio trasnacional
y
(( = 0
Lo que se conoce como segunda
condición de equilibrio o equilibrio
rotacional.
Donde ( es el momento de
torsión que se define como la tendencia a
producir un cambio en el movimiento rotación.
También se le conoce como momento de una fuerza y se
determina como el producto de una fuerza por su brazo de
palanca
( = F r
F = fuerza (N, D)
r = brazo de palanca (m, cm). Distancia
perpendicular entre la línea de acción de la fuerza
y el eje de giro
Reacciones en
apoyos y conexiones
Las reacciones ejercidas sobre una estructura
bidimensional pueden ser divididas en tres grupos que
corresponden a tipos diferentes de apoyos y conexiones
como se muestra en el siguiente cuadro


1.- Reacciones equivalentes a una fuerza cuya
línea de acción es conocida.
2.- Reacciones equivalentes a una fuerza de magnitud y
dirección desconocidas.
3.- Reacciones equivalentes a una fuerza y un
par.
Máquinas
simples
Una máquina simple es un dispositivo
que transforma en trabajo útil la fuerza
aplicada.
En una máquina simple, el trabajo de
entrada se realiza mediante la aplicación de una sola
fuerza y la máquina realiza el trabajo de salida a
través de otra fuerza única. Durante una
operación de este tipo ocurren tres procesos:
1. Se suministra trabajo a la
máquina.2. El trabajo se realiza contra la
fricción.3. La máquina realiza
trabajo útil o de salida.
De acuerdo con el principio de la
conservación de la energía, estos procesos se
relacionan en la siguiente forma:
Conservación:
Trabajo de entrada = trabajo contra la
fricción + trabajo de salida.
La cantidad de trabajo útil producido por una
máquina nunca puede ser mayor que el trabajo que se le ha
suministrado. Siempre habrá una pérdida debido a la
fricción o a la acción de otros fuerzas
disipativas. Cuanto más se reduzca la pérdida por
fricción en una máquina, mayor eficiencia se
obtendrá del trabajo suministrado.
La EFICIENCIA E de una máquina se define
como la relación del trabajo de salida entre el trabajo de
entrada

De acuerdo a la ecuación anterior la
eficiencia será un número entre 0 y 1,
para expresarlo en porcentaje habrá que multiplicar por
100.
Otra expresión útil es en
función de la potencia de entrada y salida.

De lo anterior podemos deducir que la
diferencia entre el trabajo de entrada y el trabajo de salida, es
el trabajo perdido por fricción.
Ventaja mecánica
real.
La operación de cualquier
máquina simple se puede describir de la siguiente
manera:
Una fuerza de entrada (Fe) actúa
a través de una distancia (de) realizando un trabajo
Fede.Al mismo tiempo una fuerza de salida (Fs)
actúa a través de una distancia (ds) realizando
un trabajo Fede.
La ventaja mecánica real MA de una
máquina se define como la relación de la fuerza de
salida entre la fuerza de entrada.

La ventaja mecánica real mayor que 1 indica que
la fuerza de salida es mayor que la fuerza de entrada.
Como sabemos la eficiencia de una máquina aumenta
en la medida en que los efectos de la fricción se vuelven
más pequeños. Aplicando el principio de la
conservación de la energía a la máquina
simple nos queda

La máquina más eficiente que
pudiera existir no tendría pérdidas debidas a la
fricción. Podemos representar este caso ideal
estableciendo trabajo fricción = 0, por lo
tanto:

Donde el primer miembro representa la
ventaja mecánica real, cuando se desprecia la
fricción se denomina ventaja mecánica
ideal.
De lo anterior podemos definir la
ventaja mecánica ideal como

Ventaja mecánica
ideal,
La ventaja mecánica ideal de una
máquina simple es igual a la relación de la
distancia que recorre la fuerza de entrada entre la distancia que
recorre la fuerza de salida.
De la definición de E como la
relación del trabajo de salida entre el trabajo de entrada
tenemos:

Esta es una expresión para la
ventaja mecánica real e ideal de las máquinas
simples de manera general. Es posible realizar deducciones para
diferentes tipos de máquinas en
específico.
Palanca
La máquina mas antigua y las
más comúnmente usada es la palanca simple. Una
palanca consiste en cualquier barra rígida apoyada en uno
e sus puntos al que se le llama fulcro.
La ventaja mecánica ideal para una
palanca puede determinarse a partir de:

Se considera un caso ideal porque no se
considera ninguna fuerza de fricción.
Ejemplo:
Una barra de hierro de 3 m de largo se usa para
levantar un bloque de 60 kg. La barra se utiliza como palanca. El
fulcro está colocado a 80 cm del bloque.
¿cuál es la ventaja mecánica ideal del
sistema y que fuerza de entrada se requiere? 2.75
213.82N
Si la máquina tiene una eficiencia del 70%
cual es la fuerza requerida para levantar el peso? 305.5
N
Una limitación de la palanca es que funciona a
través de un ángulo pequeño. Una forma de
contrarrestar esta restricción es permitiendo que el brazo
de palanca gire continuamente. Por ejemplo, la rueda y eje
(cabria) permite la acción continua de la fuerza de
entrada, de lo anteriormente descrito tenemos:

La ventaja mecánica ideal de una cabria es el
cociente del radio de la rueda entre el radio del eje.
Otra aplicación del concepto de palanca se tiene
mediante el uso de poleas. Una polea simple es tan solo
una palanca cuyo brazo de palanca entrada es igual a su brazo de
palanca de salida. A partir del principio de equilibrio, la
fuerza de entrada igualará la fuerza de salida y la
ventaja mecánica ideal será 1. La única
ventaja de este tipo de dispositivo es que ofrece la posibilidad
de cambiar la dirección de la fuerza de
entrada.

Una polea móvil como la de la figura tiene una
ventaja mecánica ideal de 2 ya que la distancia que
recorre la fuerza de entrada es del doble que la que recorre la
fuerza de salida.

Esta manera permite asociar el número de cordones
que soportan la polea móvil con la ventaja mecánica
ideal.

Plano inclinado
Si se desea elevar una carga desde el piso hasta cierta
altura es posible utilizar un plano inclinado, con el cual
será mas fácil mover dicha carga que elevarla
directamente, con lo que se logra que con una fuerza de entrada
menor se produce la misma fuerza de salida, sin embargo, la
fuerza de entrada menor se ha logrado a expensas de recorrer una
mayor distancia.
Considere el movimiento de un peso W hacia arriba del
plano inclinado de la figura, el ángulo de
inclinación ( y la distancia (de) que el peso debe moverse
para llegar a la altura h, en el punto más alto del plano
inclinado. Si despreciamos la fricción, el trabajo
necesario para empujar el peso hacia arriba del plano, es el
mismo que el trabajo requerido para levantarlo verticalmente,
para determinar la ventaja mecánica ideal
tenemos:

Reordenando los términos tenemos

donde el primer termino es la relación de la
fuerza de salida a la fuerza de entrada que representa la ventaja
mecánica real cuando la fricción se considera nula,
por lo cual se denomina ventaja mecánica ideal.

Una aplicación del plano inclinado es la
cuña, la cual en realidad es un plano inclinado doble. En
el caso ideal, la ventaja mecánica de la cuña de
longitud L y grosor T está dada por

La cuña se aplica en hachas, cuchillos, cinceles,
cepilladoras y todas las demás herramientas
cortantes.
Otra aplicación del plano inclinado es el
tornillo, cuyo principio se aplica a una herramienta conocida
como gato de tornillo. Cuando la fuerza de entrada
provoca un giro o revolución completa (2(R), la fuerza de
salida avanzará una distancia p, que es la distancia entre
dos roscas consecutivas y recibe el nombre de
paso del tronillo. La ventaja mecánica
ideal es la relación entre la distancia de entrada y la
distancia de salida.

Movimiento rotacional.
Es posible que un cuerpo se mueva en una trayectoria
circular, lo que se conoce como movimiento rotacional, este se
presenta cuando un cuerpo describe un movimiento circular cuando
gira alrededor de un punto fijo central llamado eje de
rotación, ejemplo: las ruedas, poleas, giroscopos,
etc.
En el movimiento circular el desplazamiento se llama
desplazamiento angular y se mide en grados, radianes o
revoluciones (ciclos).

Movimiento
circular uniforme
El movimiento circular uniforme se produce cuando un
cuerpo con velocidad angular constante, describe ángulos
iguales en tiempo iguales.
El origen de este movimiento se debe a una fuerza
constante, cuya acción es perpendicular a la trayectoria
del cuerpo y produce una aceleración que afectará
solo la dirección del movimiento sin modificar la magnitud
de la velocidad, es decir, la rapidez que lleva el cuerpo. Por
tanto, en un movimiento circular uniforme el vector velocidad
mantiene constante su magnitud, pero no su dirección, toda
vez que ésta siempre se conserva tangente a la trayectoria
del cuerpo.
VELOCIDAD ANGULAR: Representa el cociente entre el
desplazamiento angular de un cuerpo y tiempo que tarda en
efectuarlo.
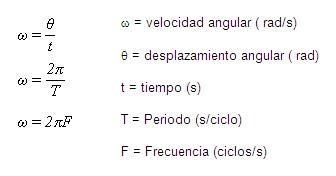
VELOCIDAD ANGULAR MEDIA

MOVIMIENTO RECTILINEO UNIFORMEMENTE VARIADO
(MRUV)
Cuando en un movimiento rectilíneo no se mantiene
constante la velocidad sino que ésta varía, se dice
que existe una aceleración.
Aceleración: Es la variación
de la velocidad con respecto al tiempo
Si la aceleración tiene el mismo sentido del
movimiento la velocidad aumentará. Si la
aceleración tiene sentido contrario al movimiento, la
velocidad disminuirá y se tiene una desaceleración
o aceleración negativa.
Un MRUV, se presenta cuando un móvil varía
su velocidad en cada unidad de tiempo de manera
constante.

Algunas expresiones matemáticas
derivadas de este concepto son:

Movimiento
circular uniformemente variado
Este movimiento se presenta cuando un móvil con
trayectoria circular varia en cada unidad de tiempo su velocidad
angular en forma constante, por lo que se aceleración
angular permanece constante.

Las ecuaciones empleadas para el movimiento circular
uniformemente variado son las mismas que las que se utilizan en
el MRUV considerando el cambio en la nomenclatura y
unidades.

Velocidad lineal
o tangencial
Representa la velocidad que llevaría una
partícula que se mueve circularmente si saliera disparada
tangencialmente.

ACELERACION LINEAL O TANGENCIAL
Una partícula presenta esta aceleración
cuando durante su movimiento circular cambia su velocidad
lineal.

ACELERACION RADIAL O CENTRÍPETA
En un movimiento circular uniforme la magnitud de la
velocidad lineal permanece constante, pero su dirección
cambia permanentemente en forma tangencial a la circunferencia.
Dicho cambio en la dirección de la velocidad se debe a la
existencia de la llamada aceleración radial o
centrípeta. Es radial porque actúa
perpendicularmente a la velocidad lineal y centrípeta
porque su sentido es hacia el entro de giro o eje de
rotación.

Como la aceleración lineal representa un cambio
en la velocidad lineal y la aceleración radial presenta un
cambio en la dirección de la misma, se puede encontrar la
resultante de las dos aceleraciones mediante la suma vectorial de
ellas

La causa del movimiento de los cuerpos es
una fuerza.
Fuerza. Es todo aquello capaz de deformar un
cuerpo o de variar su estado de reposo o de movimiento. Es la
medida de la interacción entre los cuerpos. El efecto que
una fuerza produce sobre un cuerpo depende de su magnitud,
así como de su dirección y sentido, una fuerza es
una magnitud vectorial.
Leyes de la
Dinámica.
Primera Ley de Newton: Todo cuerpo se mantiene es
su estado de reposo o movimiento rectilíneo uniforme, si
la resultante de las fuerzas que actúan sobre él es
cero. (A menos que exista una fuerza no balanceada que
actúe sobre él y cambie dicho estado)
Segunda Ley de Newton: Toda fuerza no equilibrada
que actúe sobre un cuerpo le produce a este una
aceleración que es directamente proporcional a la fuerza e
inversamente proporcional a la masa del cuerpo.

Masa: Es la cantidad de materia de un cuerpo. La
masa de un cuerpo es una medida de su inercia.
Peso: Es la fuerza gravitacional con la que la
tierra atrae a los cuerpos hacia su centro.

Segunda Ley de Newton aplicada al movimiento de
rotación pura (MCU).
La fuerza dirigida hacia el centro necesaria para
mantener el movimiento circular uniforme se conoce como
fuerza centrípeta. De acuerdo con la
segunda Ley de Newton del movimiento, la magnitud de ésta
fuerza debe ser igual al producto de la masa por la
aceleración centrípeta:

Peralte de curvas
Cuando un automóvil toma una curva cerrada en una
carretera perfectamente horizontal, la fricción entre las
llantas y el pavimento genera una fuerza centrípeta. Si la
fuerza centrípeta no es la adecuada, el auto puede
derrapar y salirse de la carretera. El máximo valor de la
fuerza de fricción determina la velocidad máxima
con la que un automóvil puede tomar una curva de un radio
determinado.

Es posible peraltar una curva, con un ángulo (
tal, que los autos que transiten con cierta rapidez no requieran
fuerza de fricción que los mantenga en su
trayectoria.
Para determinar el ángulo del peralte adecuado
para una curva en donde la fuerza normal tenga componentes
vertical y horizontal, de tal manera que la componente horizontal
proporciona la fuerza centrípeta necesaria,
tenemos:

Movimiento circular vertical.
En un circulo vertical para determinar la fuerza
centrípeta, es necesario tomar en cuenta las fuerzas que
intervienen como es el peso del objeto (dirigido siempre hacia
abajo) y la tensión de la cuerda dirigida siempre hacia el
centro de la trayectoria circular, por lo tanto cuando el objeto
pasa por el punto mas alto, la resultante de esas fuerzas es la
fuerza centrípeta y se determina como:

Energía cinética rotacional y momento
de inercia.
Para un movimiento trasnacional, la Energía
cinética está definida como:

Un cuerpo rígido se puede considerar formado por
muchas partículas de diferentes masas localizadas a
diversas distancias del eje de rotación. La energía
cinética total de un cuerpo será entonces la suma
de las energías cinéticas de cada partícula
que forma el cuerpo:

Para cuerpos que no están compuestos por masas
separadas, sino que son en realidad distribuciones continuas de
materia, los cálculos del momento de inercia son
más difíciles y generalmente se realizan utilizando
herramientas como el cálculo integral. Para algunas
figuras regulares se han determinado sus expresiones
matemáticas que se presentan en la siguiente
figura:

La segunda Ley del movimiento en la
rotación.

Se puede deducir una expresión similar para todas
las demás porciones del objeto que gira. Sin embargo, la
aceleración angular será constante para cada
porción independientemente de su masa o de su distancia
con respecto al eje. De donde:

Momento de torsión= momento de inercia x
aceleración angular.
La segunda ley de Newton para el movimiento rotacional
se enuncia de la siguiente manera:
"Un momento de torsión resultante aplicado a
un cuerpo rígido siempre genera una aceleración
angular que es directamente proporcional al momento de
torción aplicado e inversamente proporcional al momento de
inercia del cuerpo"
Trabajo y potencia rotacionales.
El trabajo en un movimiento trasnacional se define como
el producto del desplazamiento por la componente de la fuerza en
dirección del desplazamiento:

Ejemplo:
Una rueda de 60 cm de radio tiene un momento de
inercia de 5 kg m2. Se aplica una fuerza constante de 60 N al
borde de ella. a) Suponiendo que parte del reposo
¿Qué trabajo se realiza en 4 s?
b)¿Qué potencia se desarrolla? 2070 J 518
W
Cantidad de movimiento angular.
La cantidad de movimiento lineal se define como : C= m
v
En un movimiento rotacional la cantidad de movimiento
angular se designa con la letra L y será:

Ejemplo:
Una barra uniforme delgada de 1 m de largo tiene una
masa de 6 kg. Si la barra se apoya sobre su centro y gira con una
velocidad de 16 rad/s, calcule su cantidad de movimiento angular.
8kg m2/s
Conservación de la cantidad de movimiento
angular.

Cantidad de movimiento angular final = Cantidad de
movimiento angular inicial
Podemos en expresar el enunciado para la
conservación de la cantidad de de movimiento
angular:
Si la suma de los momentos de torsión externos
que actúan sobre un cuerpo o sistema de cuerpos es igual a
cero, la cantidad de movimiento angular permanece
inalterado.
Autor:
Emanuel
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |